






G/P интегратсияшудаи муҳаррики баландсифати вектории басомади тағирёбанда 4-400 кВт
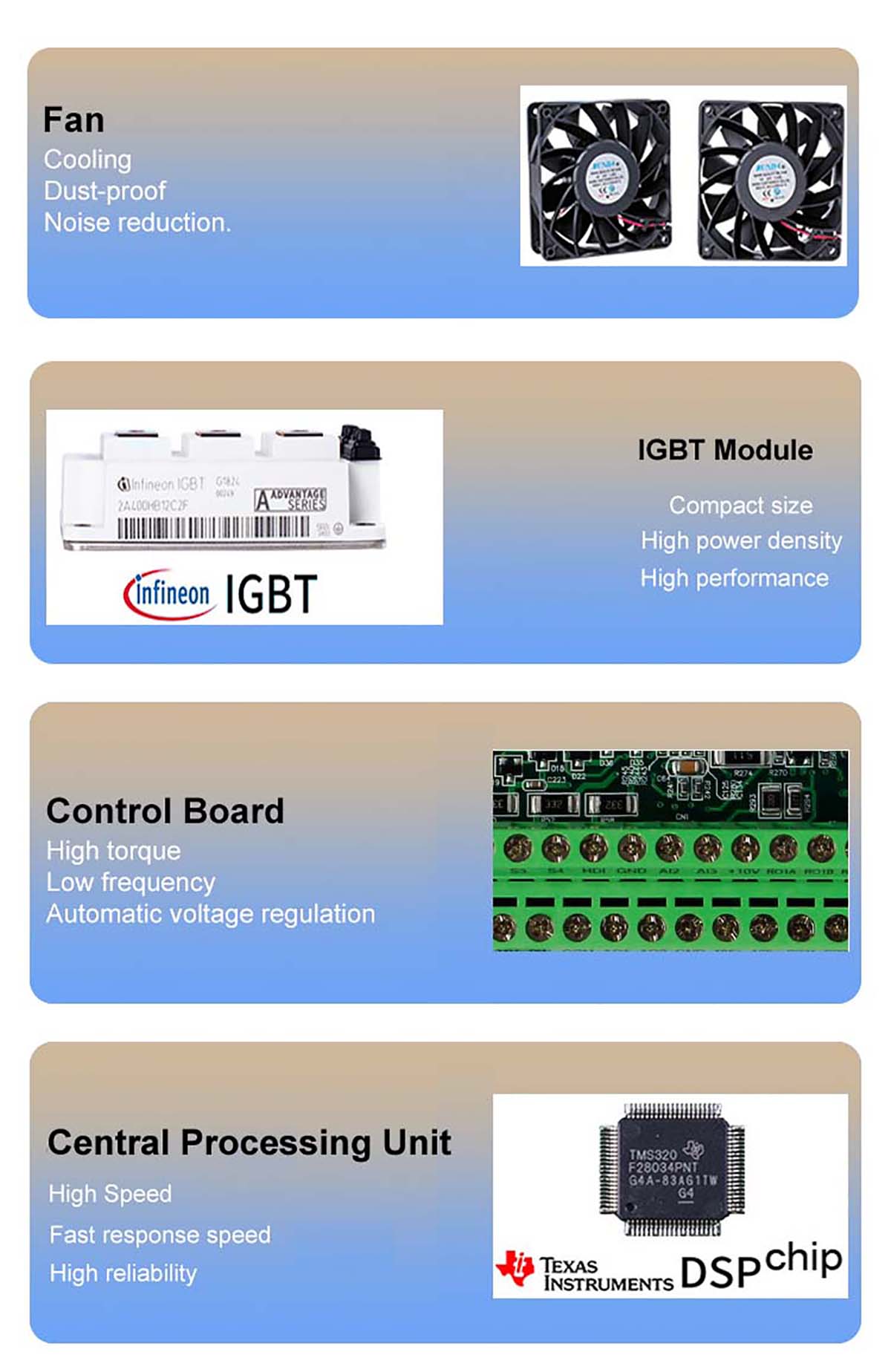
Диски басомади тағйирёбанда асосан аз росткунҷа (AC ба DC), филтр, инвертер (DC ба AC), агрегати тормоз, воҳиди гардонанда, воҳиди муайянкунанда ва воҳиди коркарди микропросессор иборат аст.Инвертер аз IGBT-и дохилӣ вобаста аст, то шиддат ва басомади қувваи барқи баромадро мувофиқи эҳтиёҷоти воқеии муҳаррик барои таъмини шиддати зарурии нерӯи барқ таъмин кунад ва сипас ба ҳадафи сарфаи энергия, танзими суръат ва илова бар инвертер ноил шавад. дорои бисёр вазифаҳои муҳофизатӣ, аз қабили аз ҳад зиёд ҷорӣ, шиддат, муҳофизат аз изофабори ва ғайра.Бо такмили мунтазами дараҷаи автоматикунонии саноат, табдилдиҳандаи басомад низ васеъ истифода мешавад.
1.Қариб тарҳи комил ва раванди истеҳсоли олӣ;
Бо маржаи калони тарроҳӣ барои ҷузъҳои асосӣ ва PCB;
Қабули пошидани автоматии пешбари саноат ва стандартҳои қатъии санҷиши автоматӣ, боварӣ ҳосил кардани маҳсулоти устувор ва боэътимод;
Бо алгоритмҳои оптимизатсияшудаи назорат ва функсияҳои ҳамаҷонибаи муҳофизат, иҷрои барҷастаи маҳсулоти мукаммалро фароҳам меорад.
2.Пайгирии суръати сахтафзор пурқувват;
Бо пайгирии суръати пурқуввати сахтафзор, ба осонӣ посух додан ба замимаҳо бо инерсияи калон, ки оғози зудро талаб мекунанд.
3. Муайянкунии дақиқи параметр;
Бо модели автоматикунонии параметри оптимизатсияшудаи мотор, ки муайянкунии дақиқро таъмин мекунад.
4. рафъи ларзиши мукаммал;
Бо пахшкунии мукаммали ларзиш, ба ҳама барномаҳои ларзиши ҷараёнҳои мотор бо иншоот баробар аст.
5. Маҳдуд кардани ҷараёни зуд;
Бо функсияи маҳдудкунандаи ҷараёни зуд, ба осонӣ ба шароит бо сарбории ногаҳонӣ посух медиҳад, ки эҳтимолияти хатогии зуд-зуд аз ҳад зиёди инверторро коҳиш медиҳад.
6. Гузариши дугонаи PID;
Бо функсияи гузариши дугонаи PID, мутобиқ шудан ба шароити гуногуни мураккаб бо чандирӣ.
7. Реҷаи сарфаи энергияи аслӣ;
Бо режими аслии сарфаи энергия, ҳангоми бори сабук, шиддати баромадро ба таври худкор коҳиш медиҳад ва сарфаи энергияро самараноктар мекунад.
8. Ҷудокунии V/F оптимизатсияшуда;
Бо функсияи оптимизатсияи ҷудокунии V / F, ба осонӣ ба талаботи гуногуни саноати инвертерҳои барқ қонеъ карда мешавад.
9. Назорати сустшавии флюс;
Назорати сустшавии флюс, макс.басомад метавонад то 3000 Гц бошад, барои барномаҳое, ки суръати баландро талаб мекунанд, осон аст.
10. Нармафзори пурқуввати мониторинги компютер;
Бо функсияҳои гуногуни мониторинги замина, мусоидат ба ҷамъоварӣ ва ба истифода додани маълумот дар макон;
Қобилияти боргузорӣ ва зеркашии параметрҳои партия ва худкорсозии ҳуҷҷатҳои ба истифода додашаванда.
| Адад | Мушаххасот | |
| Вуруд | Шиддати вуруд | 1AC 220вак(-15%---+10%),3AC 380вак(-15%---+10%) |
| Басомади вуруд | 50--60Гц±5% | |
| Натиҷа | Шиддати баромад | 0 - шиддати вуруди номиналӣ |
| Басомади баромад | 0--500Гц | |
| Хусусиятҳои назорат
| Ҳолати назорат | В/Ф Назорати вектори бе сенсор |
| Ҳолати фармони амалиёт | Назорати клавиатура Назорати терминал Назорати алоқаи силсилавӣ | |
| Реҷаи танзими басомад | Танзимоти рақамӣ, танзими аналогӣ, танзими басомади набз, танзимоти иртиботи пайдарпай, танзими суръати чандқадам ва оддии PLC, танзими PID ва ғайра. Ин танзимоти басомадро дар режимҳои гуногун муттаҳид кардан ва иваз кардан мумкин аст. | |
| Иқтидори изофабори | 150% 60с, 180% 10с, 200% 1с | |
| Моменти оғоз | 0,5Гц/150%(V/F) 0,25 Гц/150% (SVC) | |
| Диапазони суръат | 1:100(V/F), 1:200(SVC) | |
| Назорати дақиқ | ±0,5% | |
| Тағйирёбии суръат | ±0,5% | |
| Басомади интиқолдиҳанда | 0.5khz --- 16.0khz, мувофиқи хусусиятҳои ҳарорат ва сарборӣ ба таври худкор танзим карда мешавад | |
| Аниқии басомад | Танзимоти рақамӣ: 0.01HzТанзимоти аналогӣ: Басомади максималӣ*0,05% | |
| Баланд бардоштани момент | Баланд бардоштани моменти худкор;Баланд бардоштани моменти дастӣ: 0,1%--30,0% | |
| Каҷи V/F | Се намуд: хаттӣ, нуқтаҳои сершумор ва мураббаъ (1,2 қувват, 1,4 қудрат, 1,6 қудрат, 1,8 қудрат, мураббаъ) | |
| Реҷаи суръатбахшӣ / сустшавӣ | Каҷи хати рост/S;чор намуди вақти суръатбахшӣ / сустшавӣ, диапазон: 0.1s--3600.0s | |
| тормози DC | Тормози доимии доимӣ ҳангоми изҳор кардан ва қатъ карданБасомади тормози DC: 0.0Hz - басомади максимумВақти боздорӣ: 0.0s - 100.0s | |
| Амалиёти давидан | Басомади амалиёти давидан: 0.0Hz - басомади максимумВақти шитоб / сустшавӣ: 0.1с - 3600.0с | |
| PLC оддӣ ва бисёрқадам | Он метавонад суръати максималии 16 сегментро тавассути PLC ё терминали идоракунӣ иҷро кунад | |
| PID-и дарунсохт | Назорати PID-и дарунсохт барои ба осонӣ амалӣ кардани назорати наздики параметрҳои раванд (ба монанди фишор, ҳарорат, ҷараён ва ғайра) | |
| Танзими автоматии шиддат | Ҳангоми тағирёбии шиддати вуруд, шиддати баромадро ба таври худкор доимӣ нигоҳ доред | |
| Автобуси маъмули DC | Автобуси умумии DC барои якчанд инвертерҳо, энергия ба таври худкор мутавозин карда мешавад | |
| Назорати момент | Назорати моменти бе PG | |
| Маҳдудияти момент | Хусусиятҳои "Rooter", моменти ба таври худкорро маҳдуд кунед ва дар ҷараёни кор аз шикастани зуд-зуд аз ҳад зиёд ҷараён пешгирӣ кунед | |
| Назорати басомади Wobble | Назорати басомади секунҷаи мавҷи сершумор, махсус барои нассоҷӣ | |
| Назорати вақт / дарозӣ / ҳисоб | Функсияи назорати вақт / дарозӣ / ҳисоб | |
| Назорати баландшиддат ва аз ҳад зиёди ҷараён | Дар ҷараёни кор ба таври худкор ҷараён ва шиддатро маҳдуд кунед, зуд-зуд қатъ шудани ҷараён ва шиддатро пешгирӣ кунед | |
| Функсияи муҳофизати хато | То 30 муҳофизати хатогӣ, аз ҷумла ҷараён, аз ҳад зиёд, шиддати паст, гармшавӣ, марҳилаи пешфарз, изофабор, миёнабур ва ғайра. Метавонад ҳолати муфассали корро ҳангоми нокомӣ сабт кунад ва дорои функсияи аз нав барқароркунии автоматии хатогӣ | |
| Терминалҳои вуруд / баромад | Терминалҳои воридотӣ | DI барномарезишаванда: 7 вуруди фурӯзон-хомӯш, 1 вуруди набзи баландсуръат2 AI1 барномарезӣ: 0--10V ё 0/4--20mAAI2: 0--10V ё 0/4--20mA |
| Терминалҳои баромад | 1 баромади коллектори кушодаи барномарезишаванда: 1 баромади аналогӣ (баромади коллектори кушода ё баромади пулси баландсуръат)2 баромади реле2 баромади аналогӣ: 0/4--20mA ё 0--10V | |
| Терминалҳои алоқа | Интерфейси коммуникатсионӣ RS485 пешниҳод кунед, протоколи коммуникатсионӣ Modbus-RTU-ро дастгирӣ кунед | |
| Интерфейси мошини инсон | Намоиши LCD | Танзими басомад, басомади баромад, шиддати баромад, ҷараёни баромад ва ғайра. |
| Калиди бисёрфунксионалӣ | Тугмаи QUICK/JOG, метавонад ҳамчун калиди бисёрфунксия истифода шавад | |
|
Муҳити зист | Ҷойгиршавии насб | Дар дохили бино, аз нурҳои бевоситаи офтоб, чанг, гази зангзананда, гази сӯзишворӣ, дуди нафт, буғ, қатра ё намак. |
| Баландӣ | 0--2000м, То 1000м, бояд иқтидорро кам кунад. | |
| Ҳарорати муҳити зист | -10℃ то +40℃ (агар ҳарорати муҳити атроф аз 40℃ то 50℃ бошад, коҳиш меёбад) | |
| Намӣ | Камтар аз 95% RH, бе конденсатсионӣ | |
| Вибрация | Камтар аз 5,9м/с2 (0,6г) | |
| Ҳарорати нигоҳдорӣ | -20 ℃ то +60 ℃ | |
| Модели | Қувваи номиналӣ(кВт) | Васеъ (мм) | Баландӣ(мм) | Амиқ(мм) |
| NK500-2S-0,7 ГБ | 0.4 | 126 | 186 | 155 |
| NK500-2S-1,5 ГБ | 1.5 | |||
| NK500-2S-2,2 ГБ | 2.2 | |||
| NK500-4T-0,7 ГБ | 0,75 | |||
| NK500-4T-1,5 ГБ | 1.5 | |||
| NK500-4T-2,2 ГБ | 2.2 | |||
| NK500-4T-4.0GB | 4.0 | 108 | 260 | 188.5 |
| NK500-4T-5,5 ГБ | 5.5 | |||
| NK500-4T-7,5 ГБ | 7.5 | |||
| NK500-4T-11G-B | 11 | 128 | 340 | 180.5 |
| NK500-4T-15G-B | 15 | |||
| NK500-4T-18,5 ГБ | 18.5 | 150 |
365,5 |
212.5 |
| NK500-4T-22G-B | 22 | |||
| NK500-4T-30G-B | 30 | 180 | 436 | 203.5 |
| NK500-4T-37G-B | 37 | |||
| NK500-4T-45G-B | 45 | 230 | 572,5 | 350 |
| NK500-4T-55G-B | 55 | |||
| NK500-4T-75G-B | 75 | |||
| NK500-4T-90G-B | 90 | |||
| NK500-4T-110G-B | 110 | |||
| NK500-4T-132G-B | 132 | 280 |
652,5 |
366 |
| NK500-4T-160G-B | 160 | |||
| NK500-4T-185G-B | 185 |
330 |
1252.5 |
522,5 |
| NK500-4T-200G-B | 200 | |||
| NK500-4T-220G-B | 220 | |||
| NK500-4T-250G-B | 250 | |||
| NK500-4T-280G-B | 280 | |||
| NK500-4T-315G-B | 315 |
360 |
1275 |
546,5 |
| NK500-4T-355G-B | 355 | |||
| NK500-4T-400G-B | 400 |
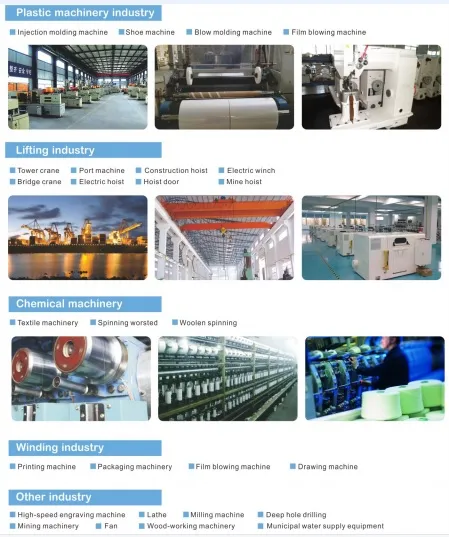

Диски басомади тағйирёбанда дар истифодаи насоси вентилятор ва обкашӣ таъсири равшани сарфакунандаи энергия дорад.Пас аз он ки сарбории вентилятор ва насос тавассути табдили басомад танзим карда мешавад, суръати сарфаи нерӯ аз 20% то 60% -ро ташкил медиҳад, зеро масрафи воқеии қувваи вентилятор ва насос асосан ба квадрати сеюми суръат мутаносиб аст.Вақте ки суръати миёнаи ҷараёни аз ҷониби корбар талаб карда мешавад, хурд аст, вентилятор ва насос барои паст кардани суръати худ назорати басомадро истифода мебаранд ва таъсири каммасрафи энергия хеле равшан аст.Аммо, вентилятор ва насоси анъанавӣ барои танзими ҷараён бафлҳо ва клапанҳоро истифода мебаранд, суръати муҳаррик асосан бетағйир мемонад ва истеъмоли қувваи барқ каме тағир меёбад.Мувофики маълумотхои статистикй сарфи кувваи электри вентиляторхо ва моторхои насосй 31 фоизи истеъмоли кувваи электр ва 50 фоизи сарфи кувваи электри саноатро ташкил медихад.
Албатта, дар мавриди кранҳо, тасмаҳо ва дигар ниёзҳои суръатбахшӣ, табдилдиҳандаи басомад низ васеъ истифода шудааст.
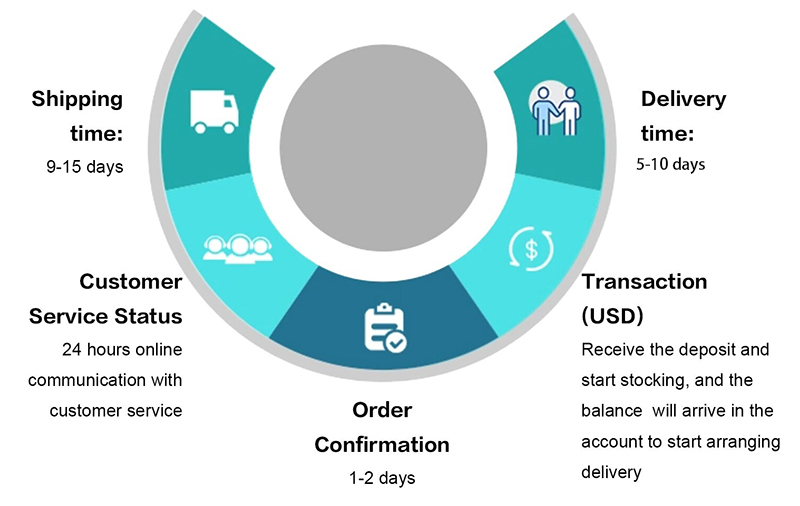
1. Хадамоти ODM / OEM пешниҳод карда мешавад.
2. Тасдиқи фармоиши зуд.
3. Вақти расонидани зуд.
4. Мӯҳлати пардохти қулай.
Дар айни замон, ширкат ба таври ҷиддӣ бозорҳои хориҷӣ ва тарҳбандии ҷаҳониро васеъ мекунад.Мо ӯҳдадор ҳастем, ки яке аз даҳ корхонаи беҳтарини содиротии маҳсулоти автоматии барқии Чин гардем, ба ҷаҳон бо маҳсулоти баландсифат хизмат кунем ва бо мизоҷони бештар ба вазъияти бурднок ноил шавем.

Категорияҳои маҳсулот
-

Девор 690в 30квар 50квар 75квар 100квар ...
-

Назоратчии қувваи рақамии Scr як марҳилаи 40a 5...
-

400v 150kvar таъминоти барқ Rack шиддати пасти Mo...
-

Нархи Фабрикаи Чин як марҳилаи насоси офтобӣ 220v ...
-

Филтрҳои гармоникии ғайрифаъол THDi 5% васеъ истифода мешаванд ...
-

Нокер марҳилаи сегона 400v 15kw 20hp Vfd тағирёбанда ...